
گیربکس آسانسور چیست ؟
گیربکس ماشینی است که برای انتقال توان مکانیکی از یک منبع تولید توان به یک مصرف کننده و همچنین برآورده ساختن گشتاور و سرعت دورانی مورد نیاز مصرف کننده به کار می رود.
گیربکس ( جعبه دنده) در واقع یک واسطه منبع توان و مصرف توان می باشد که بین منبع توان و مصرف کننده توان یک انعطاف پذیری بر قرار می کند.
به دلیل هماهنگ بودن گشتاور و سرعت دورانی منبع تولید توان با مصرف کننده نیاز به ماشینی که بتواند این هماهنگی را به صورت یک واسطه برقرار کند امری ضروری به نظر می رسد دستگاهی که این خواسته را می تواند تامین کند گیربکس و یا جعبه دنده نام دارد.
.
ساختار گیربکس حلزونی
گیربکس حلزونی چیست ؟
گیربکس حلزونی یکی از انواع پرکاربرد گیربکس های صنعتی به شمار می رود. این گیربکس در بازار با نام گیربکس ۹۰ درجه نیز شناخته می شود.
گیربکس های حلزونی یا مکعبی از نوع گیربکس های دو دنده هستند که مارپیچ ورودی آنها از جنس فولاد و دنده آنها از جنس برنج یا فسفر برنز با هاب داخلی چدنی کروی شکل می باشد. زاویه بین محور ورودی و خروجی این گیربکس ها ۹۰ درجه و یا به عبارتی دیگر خروجی آنها از بغل است.
این گیربکس ها بیشترین کاهش دور در ابعاد کوچک را ممکن می سازند. از این گیربکس ها در گشتاورهای متوسط به پایین به طور گسترده در صنایع مختلف استفاده می شود.
در کاربردهای یکسان ، این گیربکس ها نسبت به سایر گیربکس ها قیمت ارزان تری دارند. در این گیربکس ها به جهت جلوگیری از قفل شدن دنده ها در یکدیگر با افزایش دما و همچنین جنس نرم دنده ها، لقی (back Lash) وجود دارد.
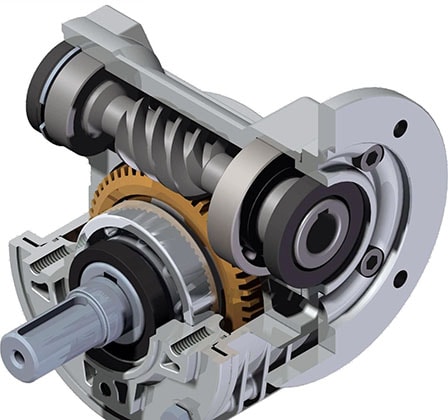
ساختار گیربکس حلزونی
گیربکس حلزونی از یک محور و یک چرخ دنده برنزی یا آلومنیومی حلزونی شکل با مقاومت بالا، جهت استحکام و پایداری در شرایط سخت به وجود می آید. گیربکس حلزونی از یک هاب کروی، شافت و بلبرینگ تشکیل شده است و امکان اتصال مستقیم شافت به الکتروموتور وجود دارد.
جنس بدنه این گیربکس ها غالبا از چدن و یا آلومینیوم می باشد و دارای مقاومت بالایی در برابر لرزش و تکانهای دستگاه را دارد.
.
مکانیسم عمل و انتقال قدرت در گیربکس حلزونی به وسیله درگیری محور و چرخ دنده ی حلزونی با یکدیگر صورت می گیرد. طراحی این گیربکس و تنوع آن در نحوه نصب سبب فراوانی مصرف آن در کاربری های مختلف شده است.
این نوع از گیربکس ها متشکل از یک ماردون فولادی که سخت کاری پیوسته شده و سنگ خورده است و یک چرخدنده حلزونی از جنس برنز ریخته گری شده است. این گیربکس ها حرکت سینماتیکی خود را از این دو قطعه تامین می کند. در گیربکس های حلزونی به دلیل ساختار و زاویه ی خروجی آنها به دلیل متعامد بودن دارای کاربری های فراوانی است و به دلیل کارکرد نرم در سیستم های بالابر و همچنین آسانسورها که نیاز به ایجاد گشتاور و راه اندازی نرم است، کاربرد فراوانی دارند.
یکی دیگر از مزایای منحصر به فرد این گیربکس ها قابلیت نصب در هشت حالت متفاوت که باعث استفاده راحت این گیربکس گردیده است و مزیت منحصر به فرد این نوع از گیربکس ها تعمیر و نگهداری آسان آنها است. از دیگر مشخصه های گیربکس حلزونی، عدم برگشت پذیری در نسبت های تبدیل بالای ۳۰ است.
.

ساختار گیربکس حلزونی
.
راندمان گیربکس حلزونی
گیربکس حلزونی به علت دارا بودن دنده هایی از نوع چرخ حلزون و پیج حلزون نسبت به گیربکس های مدل دیگر دارای راندمان پایین تری هستند که معمولا این راندمان حدود ۰.۷ است.البته این حالت معمولا شامل گیربکس حلزونی هستند که از دو دنده تشکیل شده اند. که به این دلیل به مدل از گیربکس ها گیربکس حلزونی دو دنده نیز گفته میشود.مانند گیربکس های ساخت ایران و چین و ایتالیا.
در مدل های دیگر گیربکس که معمولا توسط کمپانی آلمانی ساخته میشود گیربکس ۴ دنده تشکیل میشود که در ۲ دنده اول آن از نوع هلیکال و جنس فولاد آبکاری شده میباشد و جنس دنده حلزون (ماردون) و چرخ حلزون از فسفر برنز است.در این مدل ها راندمان گیربکس ها تا ۰.۸۵ پیش بینی میشوند.
کنترل سرعت مکانیکی موتور آسانسور
گیربکس سرعت بالائی را از محور موتور گرفته و تبدیل به سرعت کمتری در محور و فلکه گیربکس می کند . با طراحی درست قطر فلکه گیربکس و کاهش سرعت مناسب آن ، اطاقک آسانسور را توسط سیم بکسل با سرعت تعیین شده به حرکت در می آورد .
محور موتور توسط موتور در جهت یا خلاف جهت عقربه های ساعت به چرخش در می آید و در نتیجه اطاقک آسانسور توسط فلکه گیربکس به بالا یا پائین حرکت می کند .
نسبت ماردون و چرخ دنده را می توان با مقایسه سرعت ورودی و خروجی از شفت به صورت زیر محاسبه کرد :
.
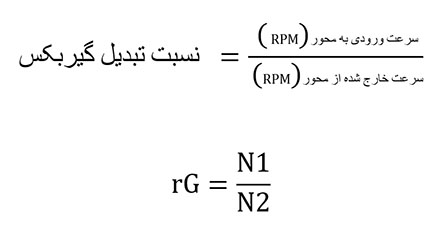
سرعت خروجی از محور ( دور در دقیقه ) / سرعت ورودی به محور ( دور در دقیقه ) = نسبت تبدیل گیربکس rG
.
برای مثال اگر سرعت ورودی ۳۰۰۰ دور در دقیقه و سرعت خروجی ۶۰ دور در دقیقه باشد نسبت تبدیل گیربکس برابر خواهد بود با rG= 3000/60 = 50/1 و نوشته می شود ( ۵۰ : ۱ )
چرخ دنده و ماردون به دلایل زیر در سیستم به کار برده می شوند :
- با یک گیربکس کوچک و با استفاده از اختلاف کمی در قطر چرخ دنده و ماردون می توان سرعت ورودی بالائی را به نسبت قابل توجهی کاهش داد
- چرخ دنده و ماردون ، گشتاور بالائی را به فلکه گیربکس انتقال داده و باعث ایجاد نیروی لازم جهت حرکت بار می گردند
- در طول عملیات به آرامی و نرمی حرکت می کنند .
- معمولاً بدون دردسر و با کارائی بالا کار می کنند
محاسبه نسبت تبدیل گیربکس برای موتوری با سرعت مشخص :
نمادهای مورد استفاده و واحد آنها :
N1 = سرعت موتور یا سرعت ورودی به محور (برحسب دور در دقیقه)
N2 = سرعت خروجی از محور مشخص نبوده ولی برابر با سرعت محور گیربکس می باشد . این دو به یکدیگر متصل هستند . (برحسب دور در دقیقه)
D = قطر محور گیربکس (برحسب متر)
V = سرعت حرکت کابین (برحسب متر در ثانیه)
VR = سرعت سیم بکسل
π = عدد پی برابر ۳.۱۴
.
همانطور که قبلاً گفتیم :
نسبت تبدیل گیربکس آسانسور rG
.
سیم بکسل نیز که در شیار محور گیربکس ( فلکه اصلی ) قرار گرفته است با همان سرعت محور گیربکس حرکت می کند ( فرض بر این است که لغزشی وجود ندارد ) .
از طرفی سرعت حرکت کابین ، V که توسط سیم بکسل و از طریق محور گیربکس به حرکت در می آید نیز بسته به طراحی ما مشخص است .
تذکر :
توجه داشته باشید که چنانچه از سیستم تعلیق یک به یک ( ۱ : ۱ ) استفاده شود ، سرعت کابین و سرعت سیم بکسل برابر است ( V = VR ) ولی اگر از سیستم تعلیق دو به یک ( ۱ : ۲ ) استفاده شود سرعت سیم بکسل دو برابر سرعت کابین خواهد بود . ( VR = 2V ) پس با داشتن سرعت حرکت کابین و از آنجا با به دست آوردن سرعت چرخش فلکه گیربکس سرعت خروجی محور (N2 ) نیز به دست خواهد آمد .
.
از آنجایی که سرعت سیم بکسل و سطح شیار فلکه با هم یکی است قطر محور گیربکس ( D ) و سرعت سیم بکسل ( VR ) برای اندازه گیری سرعت چرخش محور خروجی مورد استفاده قرار می گیرند .
محور گیربکسی با قطر D محیطی برابر با D*π خواهد داشت ( همان مسافتی که سیم بکسل در شیار فلکه حرکت می کند ) ، در نتیجه در یک چرخش ، به اندازه D*π از طول سیم بکسل از شیار عبور خواهد کرد .
سرعت سیم بکسل ، VR متر در ثانیه است ( که بنا به طراحی برابر می شود با سرعت کابین یا نصف سرعت کابین ) در نتیجه در یک ثانیه VR متر از سیم بکسل از شیار عبور خواهد کرد .
.
در هر چرخش احتیاج به D*π متر از سیم بکسل داریم تا در شیار حرکت کند .
پس در یک ثانیه چند بار مسافت D*π طی خواهد شد تا VR متر سیم بکسل جا به جا شود ؟
برای جواب می بایست VR را بر D*π تقسیم نمود :
( دور در ثانیه ) D*p/ VR= سرعت فلکه گیربکس در نتیجه سرعت خروجی محور در یک دقیقه ، N2 برابر خواهد بود با :
( دور در دقیقه ) D*π/۶۰*VR = N2
پس خواهیم داشت :
در زمانیکه این فرمول را به کار می برید ،
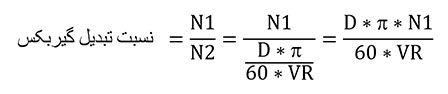
فرمول نسبت تبدیل گیربکس آسانسور
حتماً به یاد داشته باشید :
در صورتیکه از سیستم تعلیق یک به یک ( ۱ : ۱ ) استفاده شود : V= VR
در صورتیکه از سیستم تعلیق دو به یک ( ۱ : ۲ ) استفاده شود : VR = 2V و واحد D حتماً به متر خواهد بود .
گیربکس ، ساختمان ( اجزاء ) و عملکرد
قطعات متحرک در محفظه ای بسته قرار گرفته اند و فقط ابتدا و انتهای محورها دیده می شوند ، یاتاقان محورها نیز در این محفظه قرار دارند .
- محور پر سرعت ورودی ماردون
- ماردون
- محور کم سرعت خروجی گیربکس
- چرخ دنده
مجموعه گیربکس یک اتصال مناسب برای دو محور غیر متقاطع با زاویه ۹۰ درجه را فراهم می سازد .
وزنه تعادل سیستم آسانسور از حرکت محور چرخ دنده به حرکت در می آید ، سطح تماس شیب دار چرخ دنده و ماردون باعث ایجاد یک نیروی محوری بسیار زیاد در طول محور ماردون می گردد که این نیرو چه آسانسور در حال حرکت باشد و چه ثابت وجود خواهد داشت . این نیرو توسط بلبرینگهای سر و ته محور ماردون مهار می شود .
ماردون می تواند یک سرعته ( تک رزوه ) ، دو سرعته ( دو رزوه ) و یا سه سرعته ( سه رزوه ) باشد .
.
برای درک مکانیزم کاهش سرعت تصور کنید که چرخ دنده ۶۰ دندانه دارد و ماردون یک دور کامل می چرخد :
۱. در مورد ماردون یک سرعته ( یک رزوه ) زمانیکه محور ماردون یک دور کامل به دور خود می چرخد رزوه ماردون باعث چرخاندن چرخ دنده به اندازه یک محور دندانه می شود و در نتیجه چرخ دنده به اندازه ۱/۶۰ دور کامل خود چرخیده است .
بنابراین چنانچه بخواهیم چرخ دنده یک دور کامل بچرخد محور ماردون باید ۶۰ دور کامل بزند پس نسبت کاهش سرعت ۶۰ : ۱ خواهد بود .
۲. در مورد ماردون دو سرعته ( دو روزه ) دو روزه در کنار هم قرار دارند ، در نتیجه چنانچه محور ماردون یک دور بچرخد چرخ دنده به اندازه دو دندانه جا به جا می شود و در نتیجه چرخ دنده به اندازه ۱/۳۰ دور کامل خود چرخیده است .
بنابراین برای چرخش یک دور کامل چرخ دنده محور ماردون باید ۳۰ دور کامل بچرخد و در این حالت نسبت کاهش سرعت برابر خواهد بود با ۳۰ : ۱
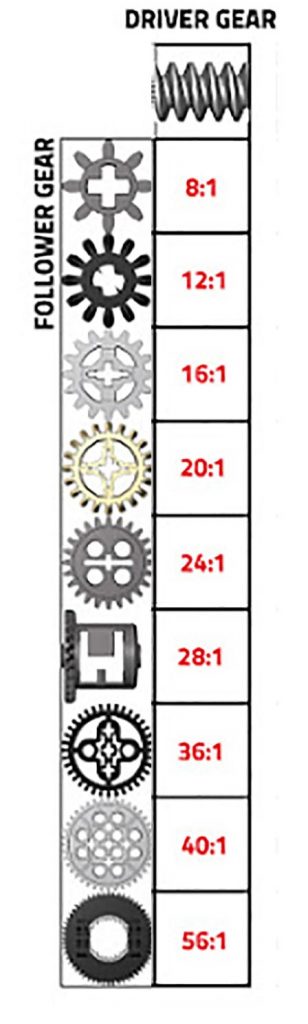
نسبت تبدیل گیربکس با چرخ دنده های مختلف
.
مشخصات فنی گیربکس حلزونی
نسبت تبدیل گیربکس حلزونی از ۵ تا ۱۰۰ میباشد . در صورت نیاز به نسبت تبدیل بالاتر باید از گیربکس حلزونی دوقلو استفاده کرد.
دور ورودی گیربکس حلزونی در گیربکس های دو دنده تا ۱۴۰۰ دور و در گیربکس های چهار دنده میتوان تا ۳۰۰۰ دور انتخاب کرد.
محدودیتهای استفاده از ماردون و چرخ دنده
گیربکسهای چرخ دنده و ماردونی برای آسانسورهایی با سرعت ۱/۶ متر بر ثانیه بسیار مناسب بوده و از کیفیت بالائی برخوردارند . این گیربکسها با نرمی ، آرامی و بدون لغزش کار خود را انجام می دهند . فاکتورهای اساسی بی صدا بودن آنها ، سرعت کم چرخ دنده و دقت بالا در ساخت چرخ دنده است .
برای آسانسورهائی با سرعت ۲ متر بر ثانیه یا بیشتر ، کاهش سرعت توسط ماردون چرخ دنده باید کمتر باشد تا بتوان سرعت خروجی بالاتری به دست آورد . در این حالت چرخ دنده با سرعت بیشتری به چرخش در می آید و در نتیجه تولید سر و صدای بیشتری می کنند .
امیدوارم که استفاده لازم رو از این مطلب ببرید.لطفا نظرات خودتان را با ما در میان بگذارید.
.
.














بی نظیر بود
خواهش میکنم
ممنون از توضیحات کامل سما